Magnetic levitation systems have long fascinated scientists and engineers, offering frictionless, contactless motion with numerous applications. However, controlling these inherently unstable and nonlinear systems has remained a significant challenge. In a groundbreaking study, researchers Marcin Jastrzębski and Jacek Kabziński have developed a novel adaptive control system that overcomes these obstacles, paving the way for unprecedented precision and performance in magnetic levitation technology. Their work combines a specialized fuzzy model of electromagnetic acceleration with an adaptive control scheme, enabling accurate tracking of desired position trajectories even with unknown system parameters. This innovative approach has the potential to revolutionize fields ranging from high-speed maglev trains and magnetic bearings to microrobotics and vibration control, transforming the way we harness the power of magnetic levitation.
Main content:
Unlocking the Potential of Magnetic Levitation
Magnetic levitation is a captivating technology that has captured the imagination of scientists and the public alike. By using a controlled magnetic field to suspend an object and move it in a specific direction, magnetic levitation systems (MLS) offer a range of remarkable advantages, including contactless, frictionless, and noiseless motion. These features have enabled the successful application of MLS in diverse fields, from bearing’>magnetic bearings to microrobotics.
Despite the allure of magnetic levitation, the development of high-performance control algorithms for these systems has remained a significant challenge. As inherently unstable and nonlinear control systems, MLS require sophisticated control strategies to precisely regulate the position of the moving object. This challenge becomes even more complex when considering the need to not only stabilize the position, but also to accurately track a desired trajectory, which is essential for many practical applications.
A Breakthrough in Adaptive Control
In a groundbreaking study, researchers Marcin Jastrzębski and Jacek Kabziński have developed a novel adaptive control system that addresses the challenges of MLS control. Their approach combines a specialized fuzzy model of electromagnetic acceleration with an adaptive control scheme, enabling precise tracking of any smooth desired position trajectory, even with unknown system parameters.
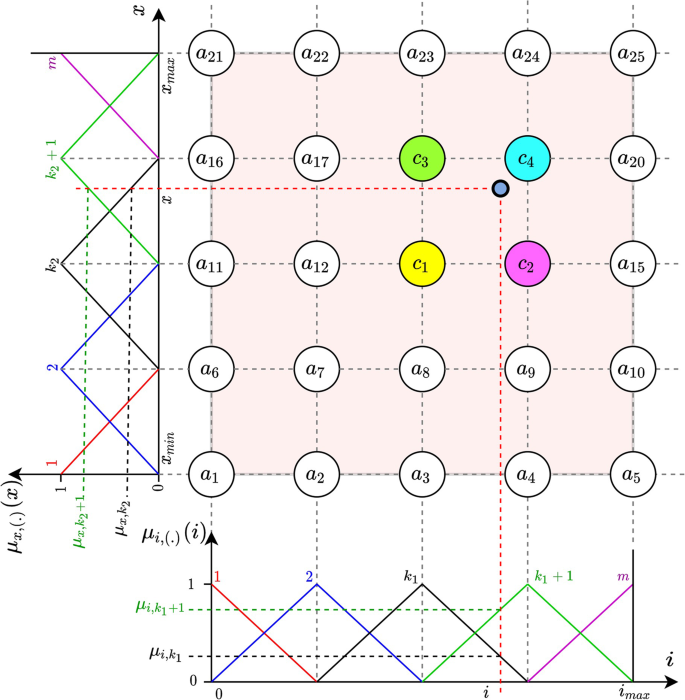
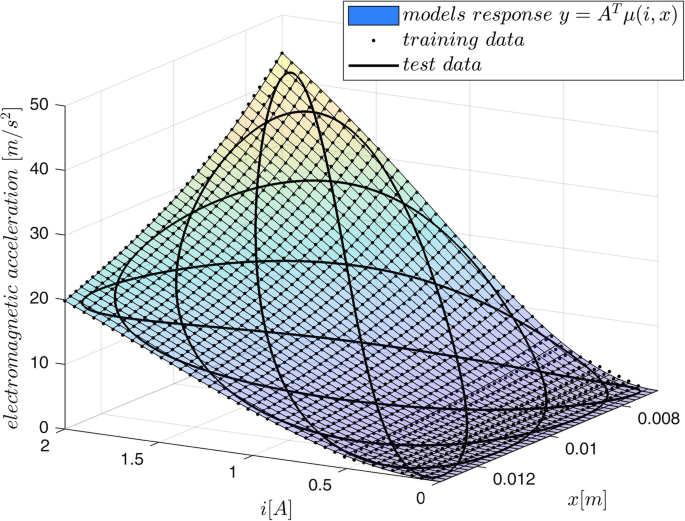
The key innovation in their work lies in the design of the fuzzy model. Unlike previous attempts that focused on modifying or optimizing the parameters of classical controllers, such as PID or state feedback, the researchers developed a unique fuzzy model that allows for fast and accurate inversion. This means that the model can quickly and efficiently calculate the current needed to generate the desired acceleration, a crucial requirement for real-time control of these fast-moving systems.
Adaptive Control Scheme and Stability Proof
The adaptive control scheme developed by Jastrzębski and Kabziński is tailored specifically for MLS, which are in a pure-feedback form and cannot be addressed using standard adaptive backstepping techniques. Their novel approach involves adaptively tuning the parameters of the fuzzy model, as well as other unknown system parameters, to ensure accurate tracking of the desired position trajectory.
Importantly, the researchers have provided a rigorous mathematical proof of the stability of the closed-loop system, demonstrating that the tracking errors are uniformly ultimately bounded (UUB) to a compact set around the desired trajectory. This means that the controller can achieve high tracking accuracy, and the size of the error band can be further reduced by adjusting the design parameters.
Practical Implementation and Experimental Validation
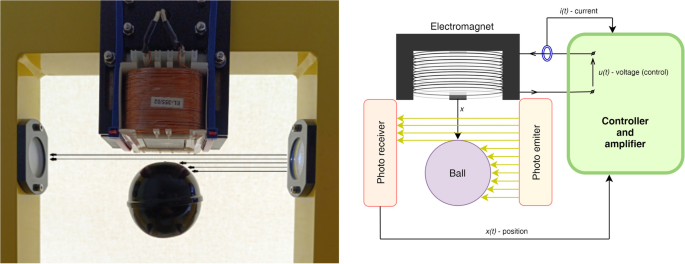
To validate their approach, the researchers conducted extensive numerical simulations and real-world experiments on a typical magnetic levitation laboratory setup. They implemented the adaptive control system on a DSP board, controlling a standard magnetic levitation ball system, and demonstrated the robustness of the controller against discretization and unknown system parameters.
The experimental results showcased the high tracking accuracy and ease of implementation of the proposed controller, even with a very inaccurate initial model of the system. This highlights the adaptability and versatility of the approach, making it a promising solution for a wide range of magnetic levitation applications.
Transformative Potential and Future Directions
The work of Jastrzębski and Kabziński represents a significant advancement in the field of magnetic levitation control. Their innovative adaptive control system based on fuzzy inversion has the potential to revolutionize the way we harness the power of magnetic levitation, with far-reaching implications across various industries and research areas.
The ability to accurately track desired trajectories, even with unknown system parameters, opens up new possibilities for enhanced performance and reliability in applications such as bearing’>magnetic bearings, microrobotics, and Click Here